
Delivery Date:Within 3 days after your order is confirmed
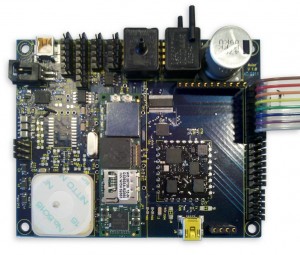
The ATI Avior autopilot is an advanced design built around high performance, high quality, state of the art components and sensors. The CPU is a 600 Mhz OMAP 3503, offering 256 Mb of Flash and 256Mb of RAM. The core sensors include a Vectornav VN100T IMU and the Ublox Neo 6 GPS. The firmware is built around an advanced 15-state kalman filter that blends the inertial and gps sensor data to accurately estimate roll, pitch, and true yaw angles. The ATI Avior offers unprecedented performance, accuracy, and capabilities in a small package and at a competitive price.
Dimensions: 103mm x 82mm x 13mm
Weight: 68grams
Texas Instruments OMAP 3503 CPU (600 Mhz ARM Cortex-A8, up to 1200 Dhrystone MIPS)
256Mb RAM, 256Mb Flash, MicroSD slot
I2C, SPI, 1-wire UART, High Speed USB Host and USB OTG, Ethernet
8 PWM in, 8 PWM out, 6 Analog in
Professional double-sided SMT (Surface-Mount Technology) Mil-Spec available
5 – 44.4V input voltage range
0C < T < 85C rated
VectorNav VN100/VN100T IMU
Accelerometer range: +/- 2g / 6g
Gyro range: 500 deg/sec
Magnetometer range: 6 gauss
Shock limit: 1000g (unpowered), 500g (powered)
Advanced 15-state Kalman filter with true-heading estimation (INS/GNS)
100hz filter updat rate
Ublox Neo 6 GPS
5 Hz navigation rate
Anti-jamming technology
Cold starts: 26 s, Hot starts: 1s
Radio modem: direct plug-in support for Digi 900 Mz XTend modem — serial or IP connection provided for external modemand hardware.
IMU based stabilization and flight control — 15-state Kalman filter provides accurate roll, pitch, and “true” yaw angle estimates
WGS-84 (great-circle) route navigation
Unlimited waypoints (limited only by hardware RAM.)
Supports fixed waypoint routes and “pattern based” routes that can be repositioned at startup or during flight
Accurate onboard wind vector estimation
Stable heading control (even in high wind operations)
Autonomous flight mode; Command Augmentation flight mode; Manual flight mode.
Circle holds (wind compensated)
Altitude hold (pitch-based or throttle based)
Speed hold (pitch-based or throttle based)
Lost link return home safety feature
Includes drivers for additional sensors and hardware
Extensive on board data logging
Real-time air-to-ground communication via an open, well documented API
Able to directly control servo based pan/tilt camera mechanism with support for WGS-84 point holds and NED vector holds
Firmware uses a robust quaternion based formulation in combination with the Kalman filter based attitude estimate to compute the correct pan/ tilt angle offsets for pointing the camera at the intended target independent of aircraft motion
Potential to leverage this internal math to drive more sophisticated stepper motor based pan/tilt mechanisms.
Auto launch, auto land (under development)